MagComp II
from Geometrics
A powerful new solution for airborne and autonomous vehicle compensation requirements. This cost effective and flexible software is employed in a post-acquisition mode so that both the raw data and the aircraft orientation information are preserved for additional analysis.
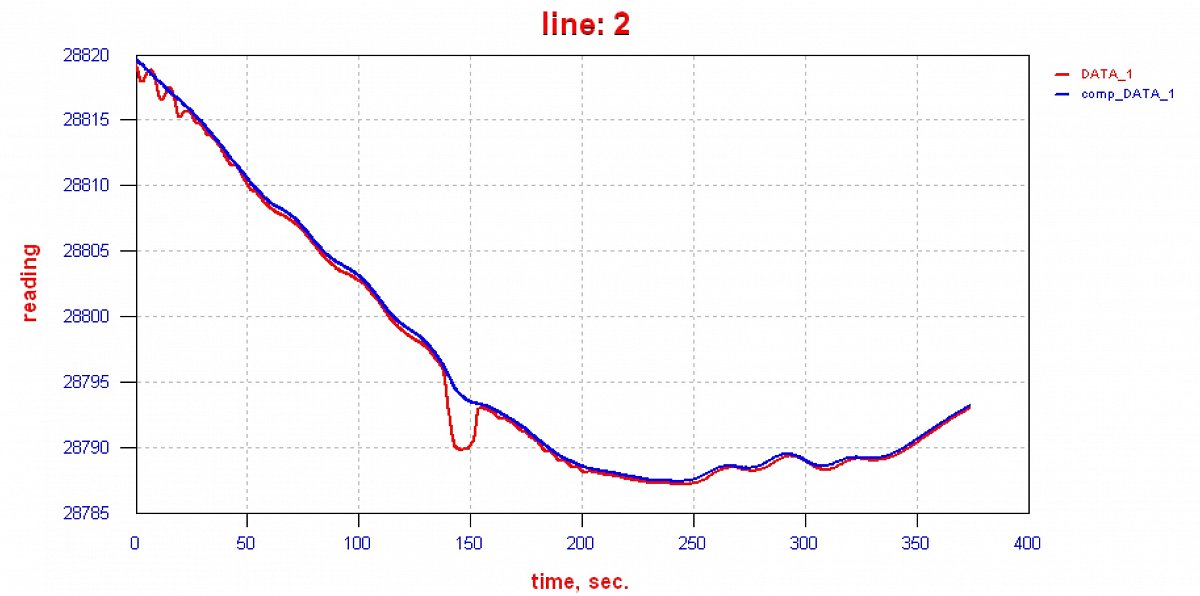
In post-processing compensation, the output from a three-axis fluxgate magnetometer compass and other optional sensor signals are recorded along with the magnetometer data. Compensation is performed as part of the magnetic data processing flow, using algorithms similar to those in the real-time compensators.
The major difference between post-processing compensation and the real-time compensator is the timing and location of the computer. Excellent compensation solutions can be obtained using this method, with an overall accuracy in the range of a few tenths of a nT with an IR of 10 expected and IR of 20 or more achievable

A major advantage of post-acquisition compensation is that as a pure data processing result, it can be reconfigured relatively easily to accommodate a variety of installations and perform compensation on several survey projects simultaneously.
If there is a particularly noisy installation or survey situation not envisaged by the standard platform noise models, MagComp II software can be reconfigured or new compensation calibration coefficients generated quickly and easily. For example, monitoring changes in electrical current generation and usage allows MagComp II to compensate for varying alternator balance between two engines of a twin-engine aircraft or remove battery power fluctuations in an Unmanned Aerial Vehicle (UAV). Similar platform noise removal can be applied to Autonomous Underwater Vehicles (AUV) or ROV’s with on-board magnetometer installations. This is done through a novel universal modelling program structure allowing flexibility and variability in the compensation solutions.
In addition with the installation of hardware sensors to monitor the position of aircraft control surfaces, removal of their magnetic effects are possible. MagComp II also allows a compass and vertical gyro system (or Inertial Navigation System) to be substituted for the fluxgate magnetometers, and has provisions for systems with rate gyros, which give much better bandwidth than the signal obtained by a time-differentiated fluxgate magnetometer output. The possibilities for further reconfiguration are limited only by the ability to instrument the interfering object’s magnetic effect and to model the response. This offers the user a more flexible and powerful solution to today’s airborne compensation problems.
Technical Specifications
| Operating System (OS): | Windows XP to Windows 10 |
|---|
Data Sheet
- MagComp II Datasheet (PDF)